12月17日至19日,由共青团中央、工业和信息化部共同主办的2023年全国大学生机器人科技创新交流营暨机器人大赛决赛在山东省日照市举办。经过激烈的角逐,学校飞行器制造学院参赛团作品:《旋进式管道清理机器人》团队成员:袁永岚(G21机械设计与制造2班);《自动化珊瑚移栽机器人》团队成员:张兴华(G22模具设计与制造1班)、谢金龙(G22无人机应用技术1班);《千载多功能水下作业机器人》团队成员:蒋佳晖(G22智能控制技术1班),分别获得全国特等奖,全国二等奖和全国三等奖的荣誉,实现了本届全国机器人大赛的“大满贯”。此次比赛我校也是唯一获得特等奖的四川省高职院校。

此次比赛丰硕的成果充分展现了学校在机器人科技创新领域的建设成果。一直以来,学校高度重视技能人才培养、科研创新工作,不断创新人才培养模式,不断打造科技创新实践平台,通过积极组建各项目竞赛团队,进一步激发师生创新精神,提升创新能力,并以竞赛为契机,“以赛促学”“以赛促教”。
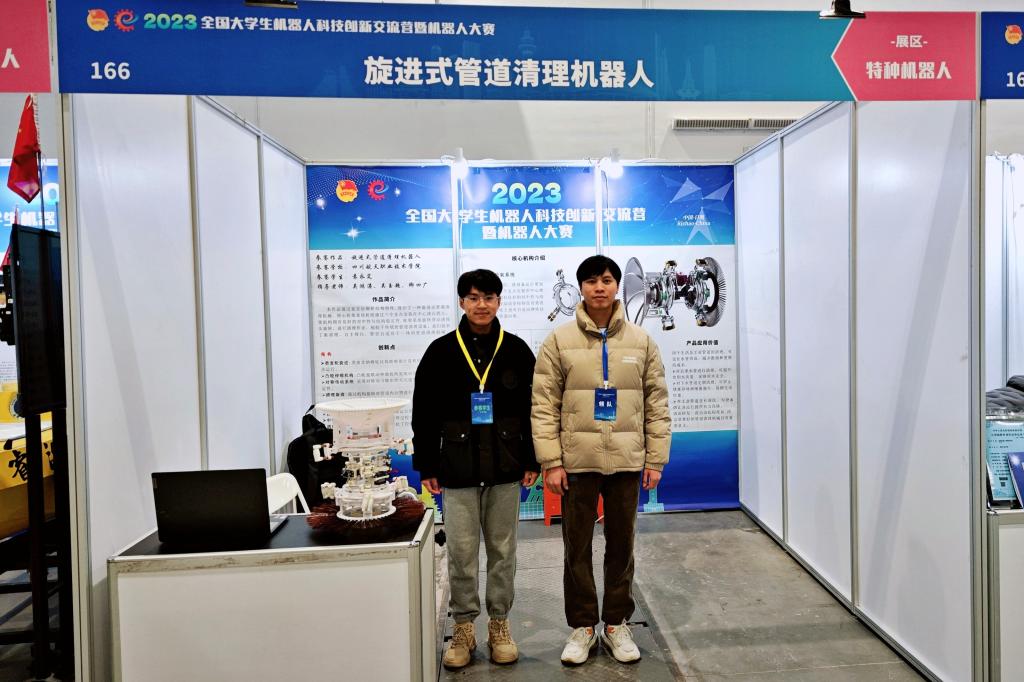

据悉,本次全国大学生机器人科技创新交流营暨机器人大赛是共青团中央、工业和信息化部共同主办的一项具有导向性、示范性和群众性的全国竞赛活动,是共青团服务大学生科技创新的重要载体。大赛共吸引了来自全国30个省、自治区、直辖市及新疆生产建设兵团431所高校的1017件作品参赛。大赛瞄准机器人前沿技术动态、产业发展趋势和人才培养需求,激发大学生学习机器人知识、交流机器人技术、传播机器人文化、投身机器人行业、攻关机器人关键核心技术的积极性、主动性、创造性。
作品展示(一)
参赛作品:《旋进式管道清理机器人》
获奖等级:全国特等奖
团队成员:袁永岚
指导老师:吴鸿涛、吴玉超、卿四广
项目介绍:本作品通过麦克拉姆轮结构特性,设计了一种旋进式管道清理机械,核心轮架系统轮组通过三个支点安装在中心排污管上,使机构拥有良好的对中性与结构稳定性,轮架系统旋转带动清理头旋转,进行清理作业,相较于传统的管道清理设备,我们做到了集清理、自主排污、管径自适应于一体的管道清理机械。
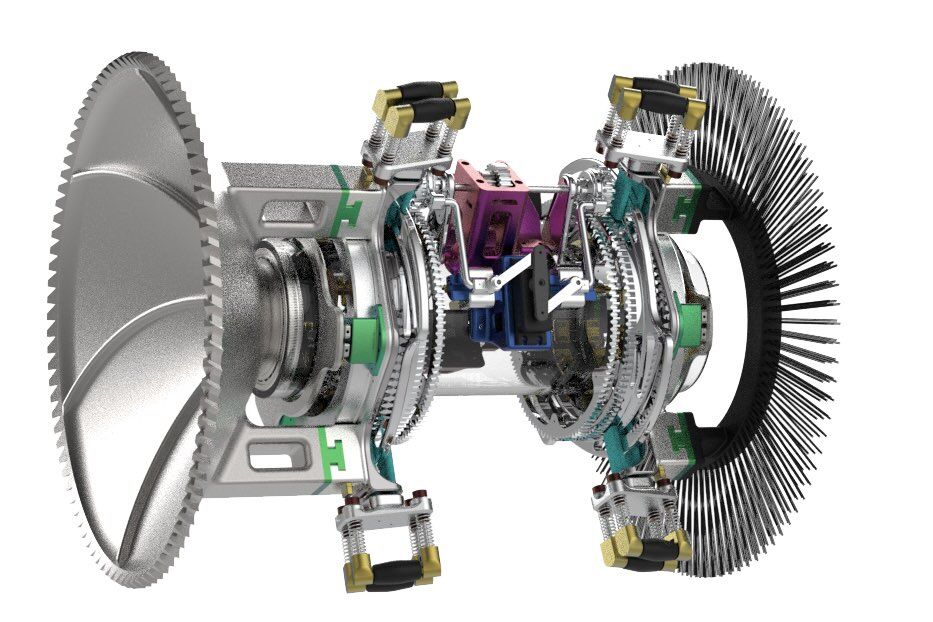
结构:
1、类麦轮旋进:类麦克纳姆轮结构能够使行进机构与清理机构同步运行。
2、凸轮伸缩机构:凸轮盘联动伸缩机构实现对管径自适应调节。
3、对称传动系统:采用对称动力输出的方式提升了机构运行的稳定性
4、清理旋盘:通过机构旋转对管道内污物进行清理。
功能:
1、自适应管径:提高了设备适用范围和运行稳定性。
2、中空排污设计:中空设计有效将清理过程中产生污物排除。
3、清理行进一体:清理行进一体化简化了控制结构,提高机构运行的稳定性和能源利用效率。
作品展示(二)
参赛作品:《自动化珊瑚移栽机器人》
获奖等级:全国二等奖
团队成员:张兴华、谢金龙
指导老师:彭世能、刘清杰、王琪
项目介绍:通过对传统珊瑚栽种技术的深入研究,我们创造性地开发了一款自动化珊瑚移栽机器人。通过模块化设计,完成了控制系统、推进器、连杆式钻孔栽种机构等零部件的制作、组装和调试,测试了移栽机器人在水下航行、转运、钻孔和栽种等作业步骤的可行性,实现了珊瑚幼苗移栽。该自动化移栽机器人替代了人工传统的修复方式,具有高安全性、高种植效率和低成本等特点,为珊瑚礁修复和生态保护提供了新的技术方案,助力我国保护海洋生态,实现人与自然和谐共存的目标。
结构:
1、珊瑚钉传送舵盘:链式物料传输机构拥有较大的珊瑚挂载量,设有全覆盖的链条,但持扣能起到减小震动提高稳定性与定位精度。
2、珊瑚移栽机构整体:移栽机构是该机器人的执行终端,当机器人到达指定移栽海床时,链式物料传输机构将绑有珊瑚幼苗的珊瑚钉输送到塔式传递手转运至对称式双摆栽种机构完成移栽。整套移栽机构结构清晰配合紧密,可以高效率、高质量且自动化完成珊瑚的移栽工作。
3、钻栽一体机构和珊瑚钉:结合并改进传统移栽方法得出一种新型栽种方式“扦孔法”使得珊瑚移栽存活率提高的同时更适合机械化。
功能:
运用机器人技术进行珊瑚幼苗移植,以取代人工修复方式,从而解决工况恶劣、安全性较低、移植过程复杂、珊瑚成活率不高、成本较大以及修复速度较慢等一系列问题。
作品展示(三)
参赛作品:《千载多功能水下作业机器人》
获奖等级:全国三等奖
团队成员:蒋佳晖
指导老师:卿四广、刘章红、彭世能
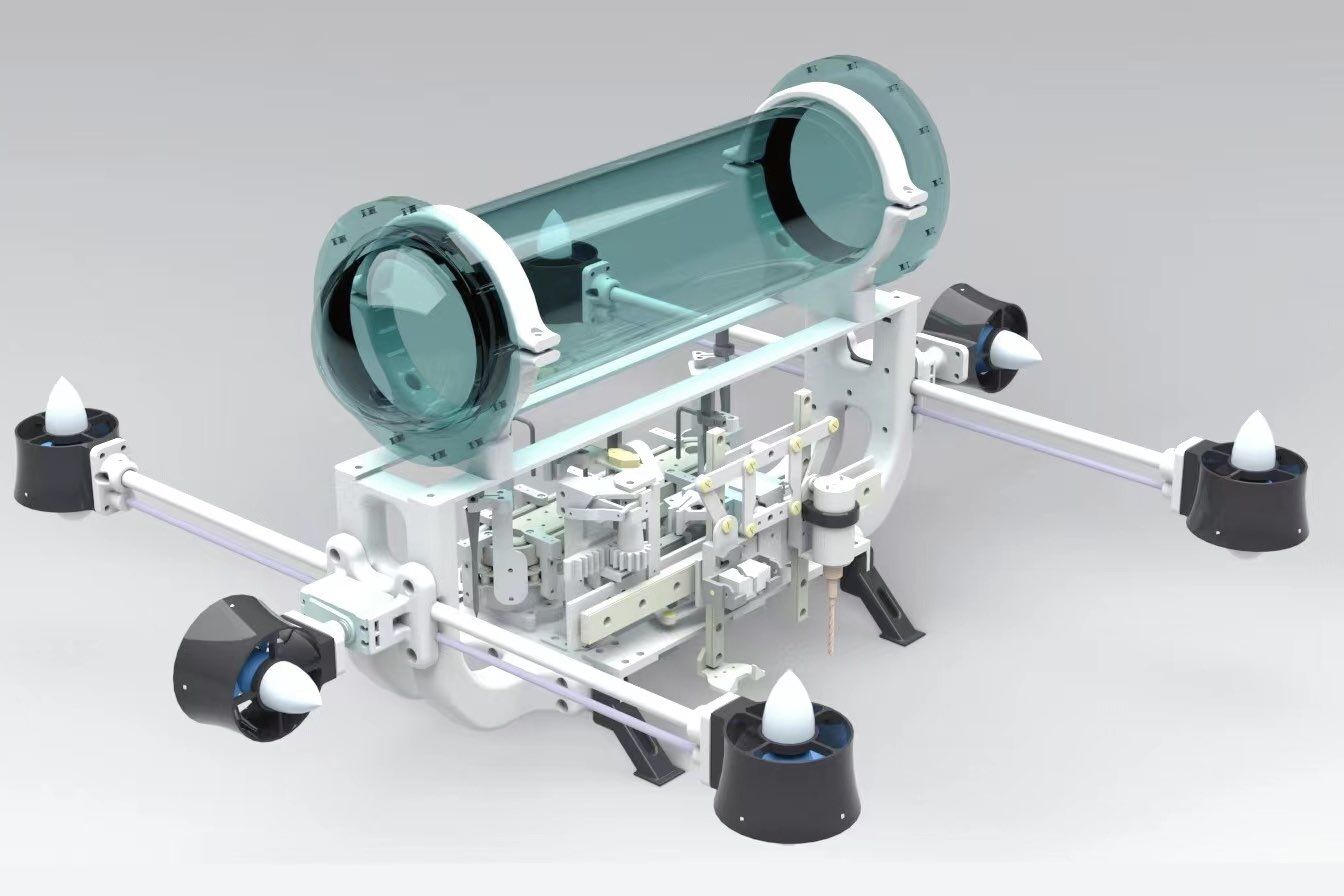
项目介绍:团队研发了一款基于水下作业的机器人,能够扩大水下机器人的应用场景、节约作业成本,降低消费门槛,让更多的个人和企业加入水下机器人生态网建设中,推动国内水下机器人的科技发展。
结构
1、仿真优化设计:利用静、动力学和流体学仿真,对水下机器人的拓展机构、机械臂、涵道进行优化,增强其稳定性和作业效率。这确保了水下机器人在复杂水下环境中的可靠性与耐用性,减少维护成本并提高养殖效益;
2、智能快拆接口:集成控制线路至快拆接口,使机械爪、网刷、水质与土质采样器等功能模块能够快速组合。让水下机器人能在短时间内完成任务。
3、数字孪生:水下机器人状态反馈至数字模型,提高水下作业效率,实现更高效的管理。机器人能迅速适应90%以上水下环境,极大提高效率,促进我国水下机器人技术发展。
功能
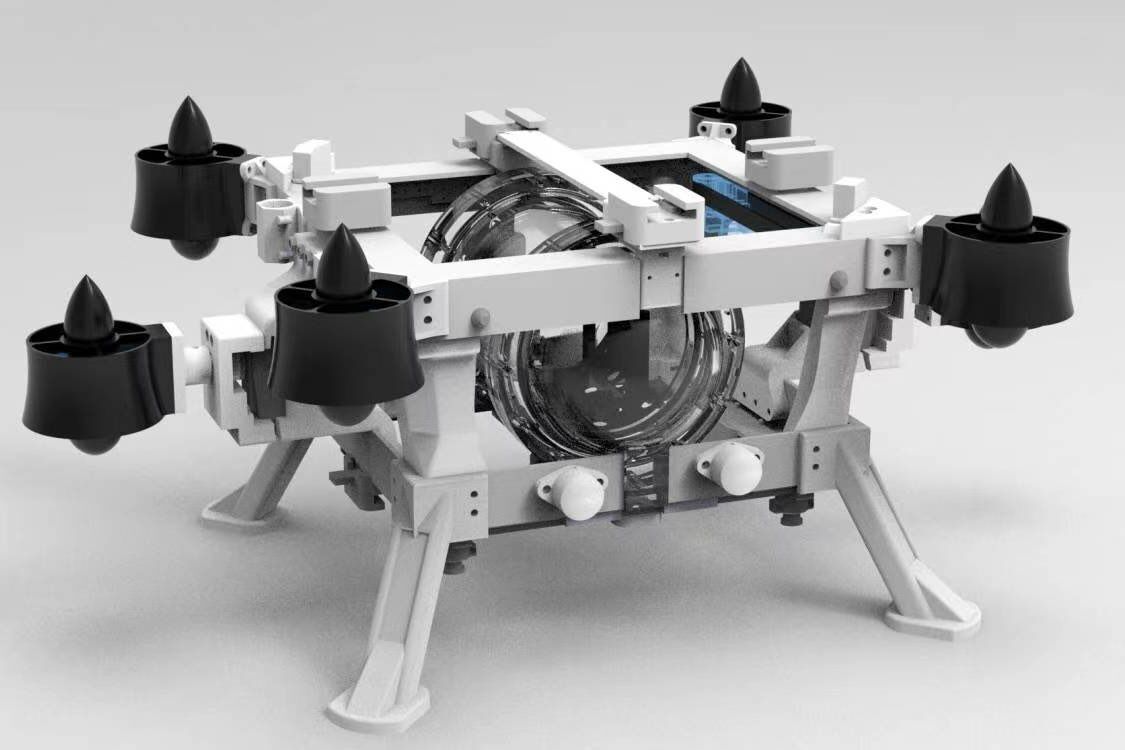
1、可拉伸机构,机器人机架具备可拉伸功能,根据机器人作业中搭载功能模块的体积和数量调整机器人机架的大小,机器人体积可调,提高了机器人的搭载空间,同时也提升了机器人的水下运动性能。
2、功能模块连接装置,通过该装置机器人可同时搭载多个模块,扩展了机器人的搭载能力,提升了机器人的使用性能。同时该连接装置可实现模块的快速拆装,提高了机器人的搭载效率。
3、浮力调节装置,在不更换机器人驱动电机的情况下,通过搭载浮力调节装置可提高机器人在水中的浮力,进而提升机器人的承载能力,也实现了能源的节约。
4、重心调节装置,作业中机器人通过陀螺仪调节整机的平衡,但若重心偏移过大就会限制机器人的运载能力,通过重心调节装置将机器人重心机械调平,进而提高了机器人的搭载性能。
5、矢量推进装置,矢量推进装置固接在机器人机架上,通过与机器人四角的动力装置配合,可实现机器人在水平状态下向任意方向运动。



 川公网安备 51011202000237号
川公网安备 51011202000237号